estimate quantities that are not directly measured
Example: Aircraft Attitude Estimation (using Accelerometer and Gyroscope)
Euler Angles
describe the orientation by roll ($\phi$), pitch ($\theta$) and yaw ($\psi$) angles w.r.t a fixed coordinate system
the measurement of gyroscopes (p, q, r) are not equal to ($\dot{\phi}$, $\dot{\theta}$, $\dot{\psi}$)
Accelerometer
measure accelerations of all axis: $a = [a_{x}, a_{y}, a_{z}]~ (m/s^{2})$
Accelerameter model
If the accelerometer is at rest, we can get $\phi$ and $\theta$ from:
$a_{x} = g * \sin(\theta)$
$a_{y} = -g * \sin(\phi) * \cos(\theta)$
$a_{z} = -g * \cos(\phi) * \cos(\theta)$
and get:
$\hat{\phi}_{acc} = \tan^{-1}(\frac{a_y}{a_z})$
$\hat{\theta}_{acc} = \sin^{-1}(\frac{a_x}{g})$
Practical considerations
only close to true at rest
noise term: HF noise and need low-pass filter to measurements
Time-varying bias: how to estimate? initial calibration?
Gyroscope
Measures angular rate of rotation around each axis: $\omega_b = [p, q, r]~ (rad/s)$
Gyroscope model
Need to transfrom body rates to Eulaer rates:
$\dot{\phi} = p + \tan(\theta) * (q * \sin(\phi) + r * \cos(\phi))$
$\dot{\theta} = q * \cos(\phi) - r * \sin(\phi)$
$\dot{\psi} = \frac{q * \sin(\phi) + r * \cos(\phi)}{\cos(\theta)}$
Practical considerations
fixed sampling time T
we need to know $\phi$ and $\theta$ to get $\dot{\phi}$ and $\dot{\theta}$
Can’t simply get them by integrating $\dot{\phi}$ and $\dot{\theta}$ from accelerometer measurements, due to time-varying bias, which leads to gyro drift
need low-pass filter and optional very low cutoff high-pass filter
Conclusions
Accelerometer is good at estimating attitude when the object is at rest
Gyroscope is good at estimating attitude over short periods of time
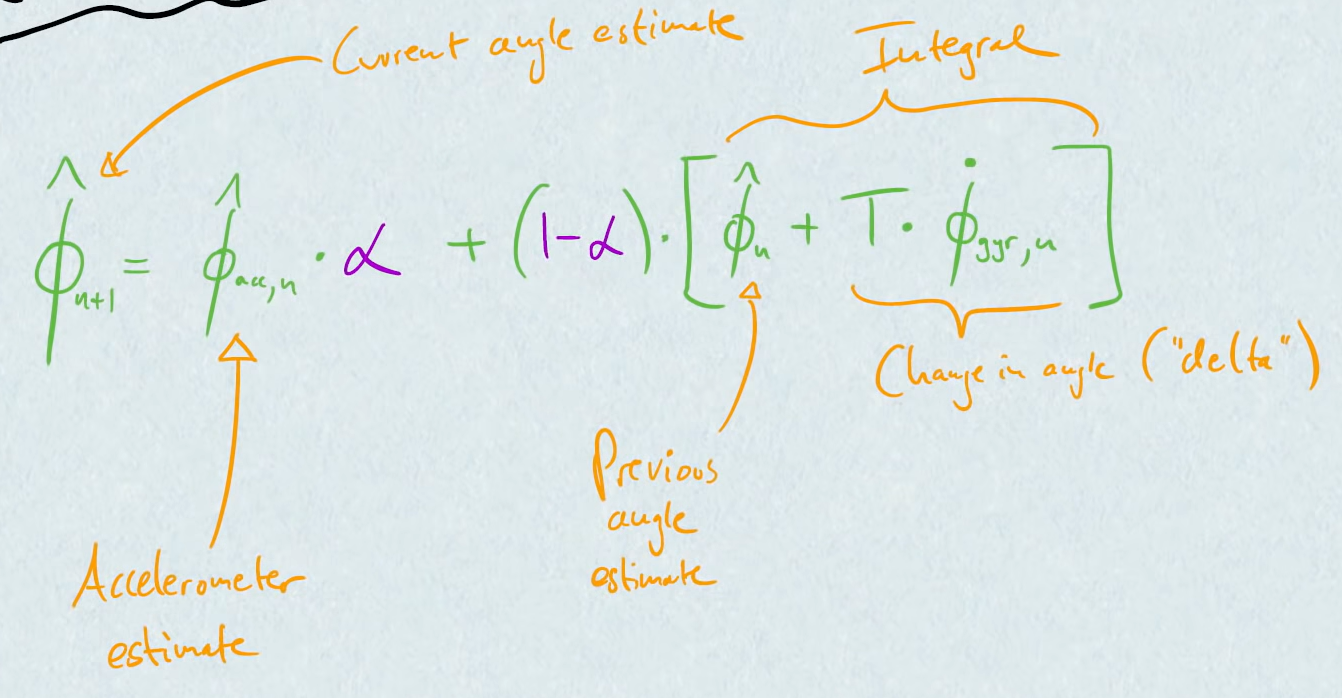
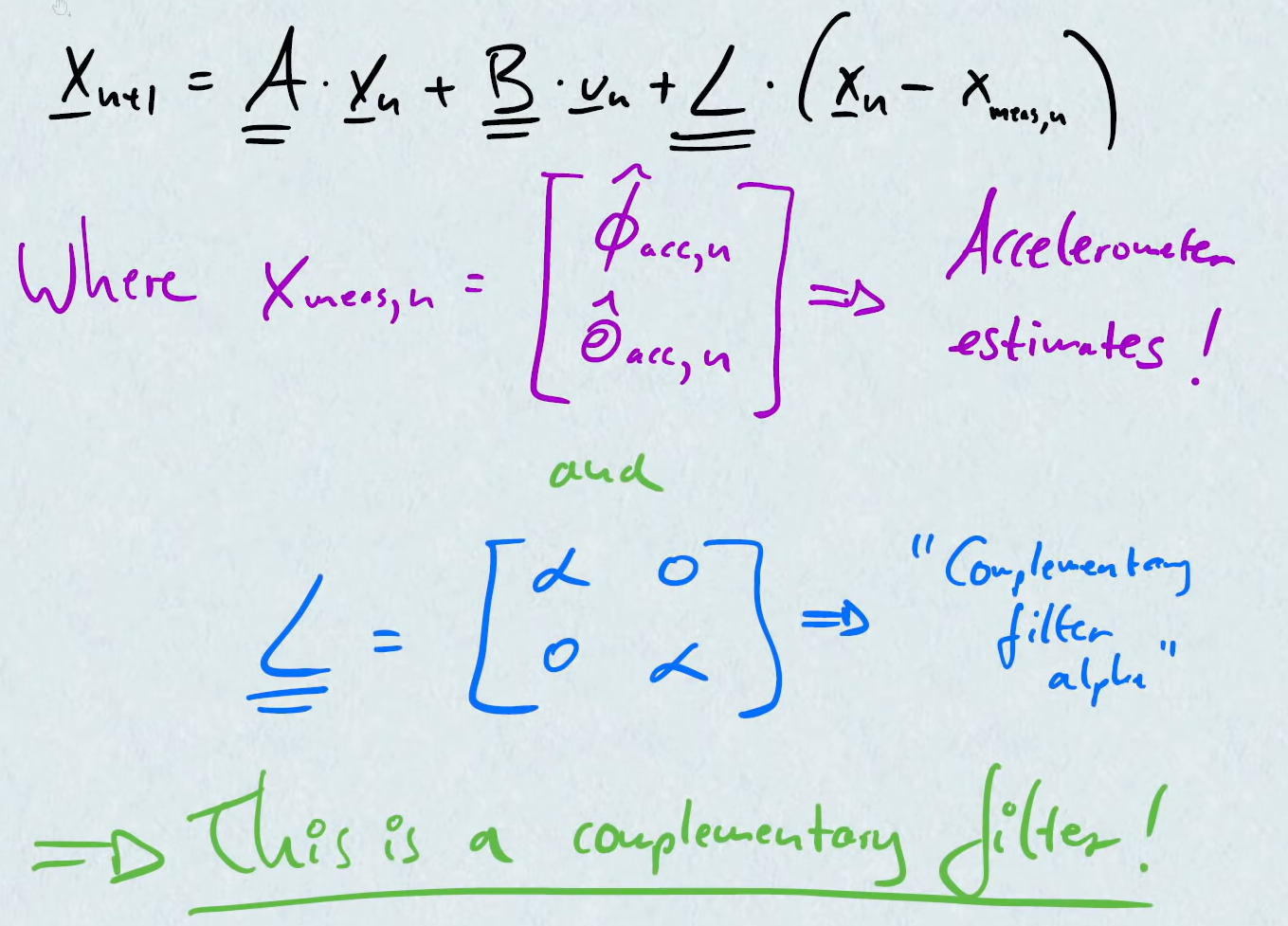
Need to combine the two to get a good estimate of attitude